|
Wegweiser |
||||||||||||
 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Elektronik / Arduino / Murmelsortierer / Konstruktion |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
|
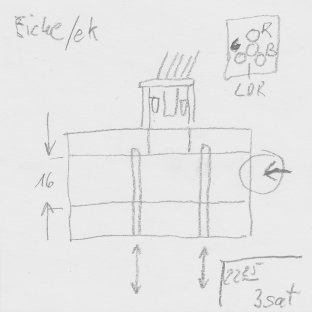
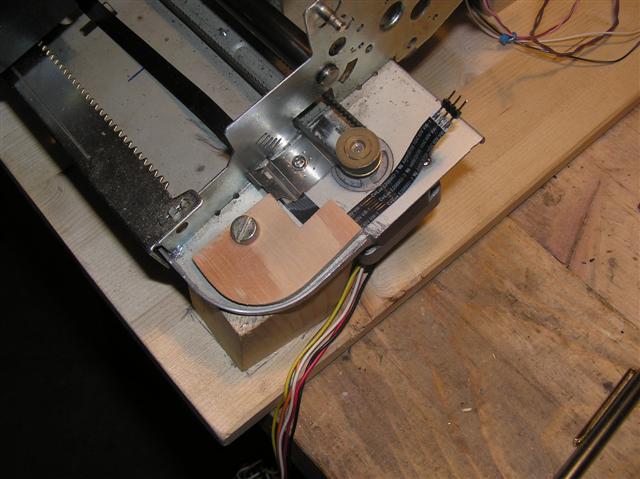
Das Bild zeigt die Messkammer. Oben aufgesetzt der Träger der Einheit aus Beleuchtung und Sensor. Nicht sichtbar sind die von unten in die Kammer führenden Schieber. Vom Schacht ist die Öffnung für den Einlass einer Murmel zu sehen. |
|
Die Sensorik |
|
|
||||||||||||||||||||||||||||
|
Verhalten des Fotowiderstands |
 |
|
|
|
|
|
|
|
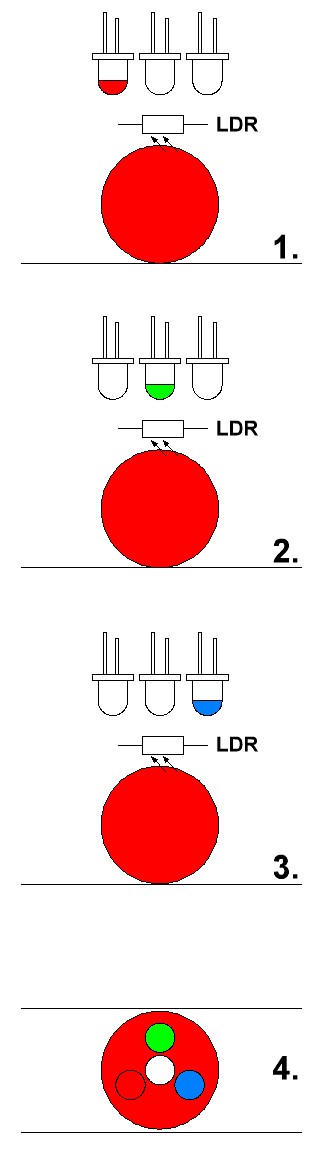
Nach weiteren 50 ms wird die LED ausgeschaltet. |
|
|
|
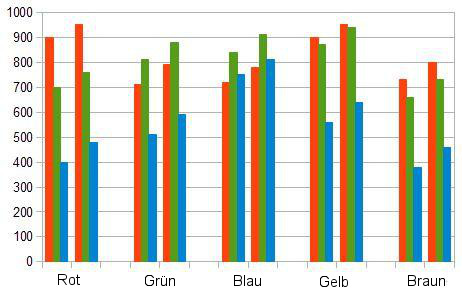
Die ermittelten RGB-Muster |
 |
|
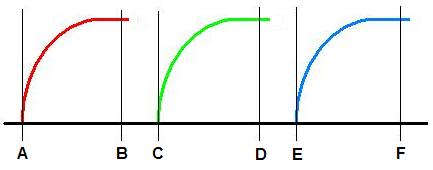
Die X-Achse benennt die Murmelfarbe, die Y-Achse die mit analogRead gemessenen Werte. |
|
|
Der jeweils linke Säulenblock zeigt die niedrigsten, der rechte Block die höchsten Messergebnisse. |
|
|
Daraus ergeben sich eindeutige den Murmelfarben zuzuordnende RGB-Bereiche. Diese sind in Variablen hinterlegt mit deren Hilfe die Murmeln entsprechend sortiert werden. |
|
|
Die Schiebersteuerung |
|
|
||||||||||||
 |
|
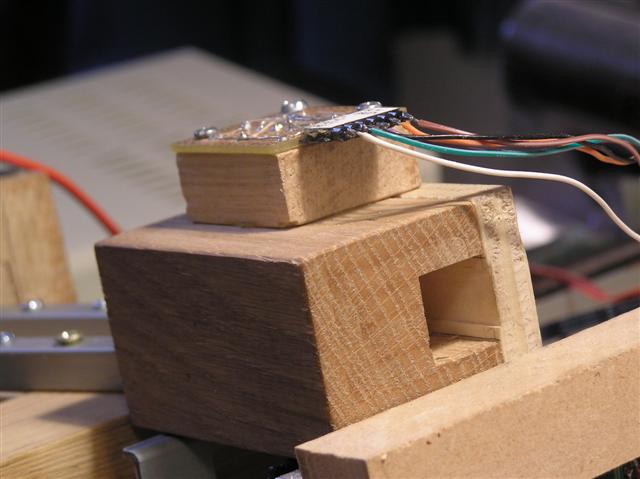
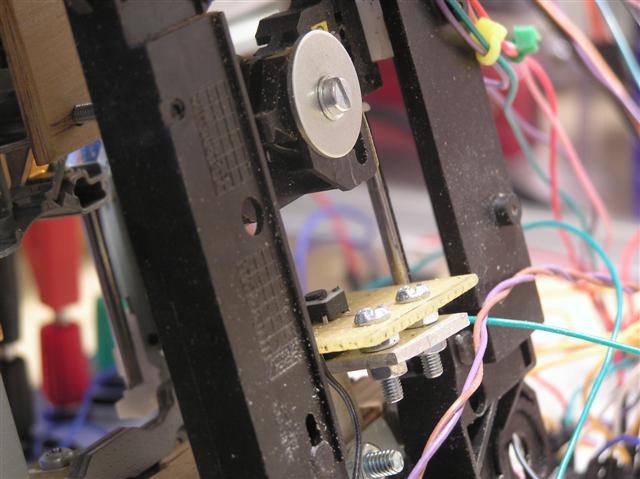
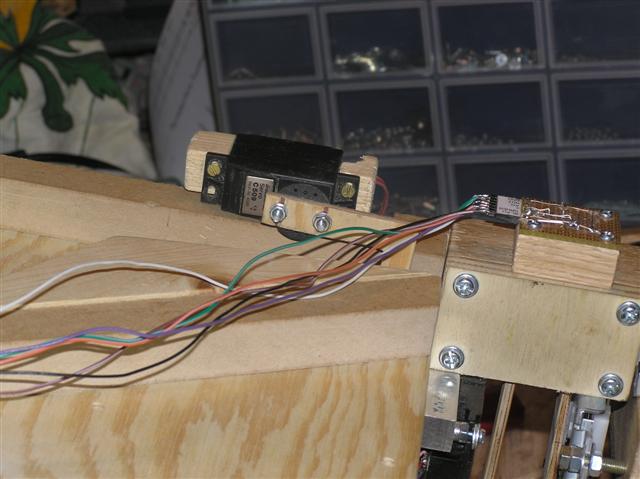
Die Betätigung des Einlass-Schiebers. Auf der kleinen Leiterplatte ist der Schalter zu erkennen, der die Position des Motors während des Setup festlegt. Links oben ist ein Stück vom Schieber zu sehen. |
|
Die Murmelzufuhr |
|
|
 |
|
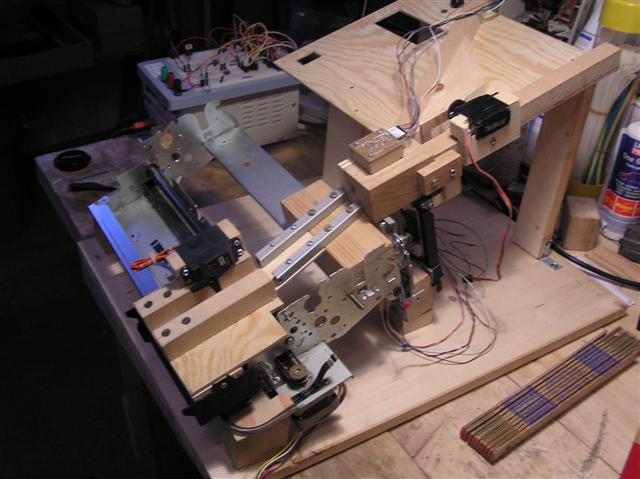
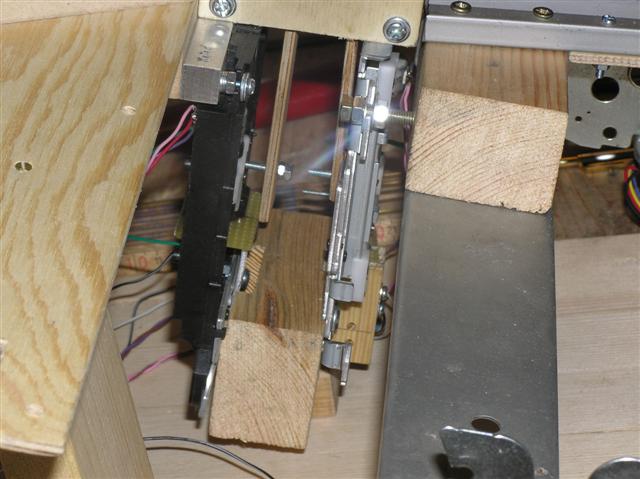
Die rechte seitliche Begrenzung der Wartefläche bestand zunächst aus der geraden Leiste. Versuche mit einem Pappestreifen ergaben als günstigste Form für den Einlauf eine Kurve, die mit einem Brett nachgebildet wurde. Das Problem wurde leider nur abgeschwächt. Zwar seltener als zuvor, aber Staus gibt es nach wie vor. Wie auf der Autobahn. |
|
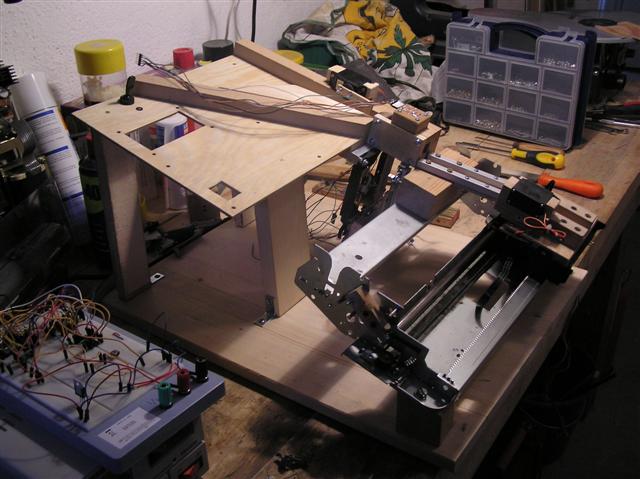
Der fertige Rohbau |
|
|
 |
 |
|||
 |
|||
 |
|||
 |
|||
 |
|||
 |
|||
|
. |
|||